Юриспруденция
- Адвокаты
- Административное право
- Возмещение вреда
- Воинский учет
- Гражданство
- ДТП, ОСАГО, ГИБДД
- Договорное право
- ЖКХ,ТСЖ,выселение
- Загранпаспорта, визы
- Интеллектуальная собств.
- Кредиты и займы
- Медицинское право
- Налоги
- Наследство
- Недвижимость
- ООО, АО, ИП
- Оценка имущества
- Потребительское право
- Правоведение
- Произвол чиновников
- Семейное право
- Социальное право
- Страховое право
- Судебные приставы
- Судебный эксперт
- Таможня
- Трудовое право
- Уголовное право
Все категории
- Медицина
- Акушерство и гинекология
- Аллергология (иммунология)
- Анестезиология
- Ветеринария
- Гастроэнтерология
- Гомеопатия
- Дерматология
- Диетология
- Инфектология
- Кардиология
- Наркология
- Неврология
- Нефрология
- Онкология
- Ортопедия
- Оториноларингология
- Офтальмология
- Педиатрия
- Психиатрия
- Ревматология
- Рентгенология
- Сексология
- Стоматология
- Терапия
- Травматология
- Урология
- Фармация
- Хирургия
- Эндокринология
- Красота, Здоровье
- Бизнес
- Дом, отдых, хобби
- Религия



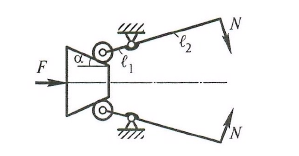 манипулирования в губках схвата с заданной силой N. Считать заданными размеры звеньев схвата l1, l2 и угол α. Рис. 5.1 Способ удержания объекта: удержание двумя рабочими элементами, рабочая поверхность которых представляет призму. 1. Для преобразователя движения схвата обозначить звенья и провести структурный анализ механизма. 2. Определить характер движения схвата (вращательное, поступательное, прямолинейное). 3. Определить передаточное отношение преобразователя движения схвата. 4. Определить усилие привода F по известному значению усилия захвата N.
манипулирования в губках схвата с заданной силой N. Считать заданными размеры звеньев схвата l1, l2 и угол α. Рис. 5.1 Способ удержания объекта: удержание двумя рабочими элементами, рабочая поверхность которых представляет призму. 1. Для преобразователя движения схвата обозначить звенья и провести структурный анализ механизма. 2. Определить характер движения схвата (вращательное, поступательное, прямолинейное). 3. Определить передаточное отношение преобразователя движения схвата. 4. Определить усилие привода F по известному значению усилия захвата N.